In the Colpitts oscillator, the impedance in the feedback circuit is a resonant LC . network. See Figure 14-46(a). The frequency of oscillation is the resonant frequency of the network, which is the frequency at which the phase shift through the network is 180°. At th~t frequency, the impedance is a real number.The feedback network. The impedance looking into the network from the amplifier output is the parallel combination of -jXc, and (jXL – j XCz):

the network is open, as can be seen in Figure 14-46(b). In reality, it is loaded by input resistor R, (Figure 14-46(a». Therefore, equation 14-94 is an approximation, but it is valid when Since Vo appears across the voltage divider consisting of Land C2 the feedback factor (again neglecting R1) is

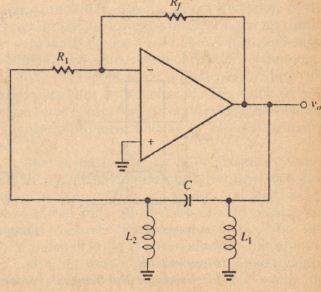
The Hartley Oscillator
The impedance in the feedback of a Hartley oscillator is a resonant LC network consisting of two inductors and one capacitor. See Figure 14-47. As in the Colpitts oscillator, oscillation occurs at the resonant frequency of the network, the frequency at which its impedance is real. Following the same procedure used to derive the
oscillation frequency and feedback factor of the Colpitts oscillator. we can show (Exercise 14-44) that
If L, and L2 are wound on the same core and therefore have mutual inductance M, then L, in equation 14-98 is LT = L, + L2 + 2M. In order to satisfy iA,.f3i I in the Hartley oscillator, we require, from equation 14-99,
Basic Filter Concepts
A filter is a device that allows signals having frequencies in a certain range to pass through it while attenuating all other signals. An idell/filter has identical gain at all frequencies in its passband and zero gain at all frequencies outside its passband. Figure 14-48 shows the ideal frequency response for each of several commonly used filter types, along with typical responses for practical filters of the same t) pes.

In each case, cutoff frequencies arc shown to be those frequencies at which the response is down 3 dB from its maximum value in the passband. Filters arc widely used to “extract” desired frequency components from complex signats amHof reject undesired ones, such as noise. Passive filters are those constructed with resistors, capacitors, and inductors, while active filters employ active components such as transistors and operational amplifiers, along with resistor-capacitor networks. Inductors arc rarely used with active filters, because of their bulk, expense, .and lack of availability in a wide range of values.
Filters arc classified by their order, an integer number, also called the number of poles. For example, a second-order filter is said to have two poles. In general, the higher the order of a filter, the more closely it approximates an ideal filter and the more complex the circuitry required to construct it. The frequency response outside till! passband of a filter of order” has a slope that is asymptotic to 20″ dB/ decade or 01/ dB/octave. Recall that a simple RC network is called first-order, or single-pole, filter and its response falls off at 20 dls/dccadc. The classification of filters by their order is applicable to all the filter types shown in Figure 14-48. We should note that the response of every high-pass filter must eventually fall off at some high frequency because no physically realizable filter can have infinite bandwidth. Therefore, every high-pass niter is, technically’ speaking, a bandpass filter. However, it is often the case that a filter behaves like a high-pass for all those frequencies encountered in a particular application, so for all practical purposes it can be treated as a true high-pass filter, The order of a high-pass filter affects its frequency response in the vicinity of Ii (figure 14-4X(b)) and is not relevant to the high-frequency region, where it must eventually fall off. Filters arc also classified as belonging to one of several specific design types that. like order, affect their response characteristics within and outside of their pass bands. The two categories we will study arc called the and CIJehys/wv types. The gain magnitudes of low- and high-pass Butterworth filters obey the relationships where M is a constant, 11 is the order of the filter, Ii is the cutoff frequency of the high-pass filter, and!; is the cutoff frequency of the low-pass filter. M is the maximum gain approached by signals in the passband. Figure 14-49 shows low- and highpass Butterworth responses for several different values of the order, II. As frequency f approaches 0, note that the gain of the low-pass filter approaches M. For very large values oi], the gain of the high-pass filter approaches M. The value of M is I, or less, for passive filters. An active filter is capable of amplifying signals having
frequencies in its passband and may therefore have a value of M greater than I.
M is called the “gain” of the filter
The Butterworth filter is also called a niaximally flat filter, because there is relatively little variation in the gain of signals having different frequencies within its passband. For a given order, the Chcbyshev filter has greater variation in the passband than the Butterworth design, but falls off at a faster rate outside the passband. Figure 14-50 shows a typical Chcbyshev frequenc), response. Note that the cutoff frequency for this filter is defined to be the frequency at the point of intersection of the response curve and a line drawn tangent to the lowest gain in the passband. The ripple width (RW) is the total variation in gain within the passband, usually expressed in decibels. A Chebyshev filter can be designed to have a small ripple width, but at the expense of less attenuation outside the passband.

A Chebyshev filter of the same order as a Butterworth filter has a frequency response closer to the ideal filter outside the passband, while the Butterworth is closer to id,,,.1 “,i,!.:n tuc :,””,<;b;.nrl TI i” f:ld is illustrated ill Figure 14-51, which compares the responses of second-order, low-pass Butterworth and Ch,:I)~O”h(!v filters hav ing the same cutoff frequency. Note that both filters have responses asymptotic to 40 dls/dccade outside the passband, but at any specific frequency beyond cutoff, the Chebyshev shows greater attenuation .1, .. ” d,o.: Butterworth.
A bandpass filter is characterized by a quantity called its (! (ongin:!~il’!? from “quality” factor), which is a measure of how rapidly its gain changes at frequencies outside its pass band. Q is defined by where fo is the frequency in the passband where the gain is maximum, and BW is the bandwidth measured between the frequencies where the gain is 3 dB down from its maximum value. J.. is often called the center frequency because, for many high-Q filters (Q 2:: 10), it is very nearly in the center of the passband. Figure 14-52 shows the frequency responses of two bandpass filters having the same maximum gain but different values of Q. It is clear that the high-Q filter has a narrower bandwidth and that its response ralls off faster on either side or the passband than that of the low-Q filter.
The gain magnitude of any second-order bandpass filler is the following function of frequency f:
where /1 and [: arc the lower and upper cutoff frequencies. As previously mentioned, j;, is very nearly midway between the cutoff frequencies (the arithmetic mean) in high-Q fillers.



